
Movimiento Omnidireccional: Se refiere a la capacidad de un objeto o sistema para moverse en cualquier dirección sin cambiar su orientación. Esto significa que puede moverse hacia adelante, hacia atrás, hacia los lados y girar sin tener que dar la vuelta completa.
Es importante definir el concepto de rueda mecanum debido a que esta presenta características especiales que ayudan al movimiento Omnidireccional. Este tipo de elementos cuentan con rodillos en la superficie exterior de la rueda, cada rodillo cuenta con un ángulo de 45° favoreciendo el movimiento del robot. El contacto entre los rodillos y la superficie del suelo puede causar una fuerza de fricción opuesta a de los rodillos, por lo que la fuerza de fricción que actúa sobre la rueda es en la dirección de 45°. El Robot cuenta con cuatro ruedas mecanum y cada una de estas debe de colocar en un determinado orden para un optimo funcionamiento. Se observa desde la vista superior y en desde su centro se observa como la unión de las cuatro ruedas forman una “X” por el acomodo de los rodillos.
El 4WD Omnidireccional puede desplazarse hacia atras, adelante, a la izquierda o a la derecha, pero tambien se puede mover de manera oblicua o tambien alrededor de su centro geométrico.
Ahora te estarás preguntando ¿Cómo es posible que realice estos movimientos?. En realidad es super fácil, para comprender el desplazamiento detrás del Robot es importante realizar un análisis de fuerza en cada una de las ruedas. Comencemos por uno de los que pueden resultar complejos, el desplazamiento a la derecha.
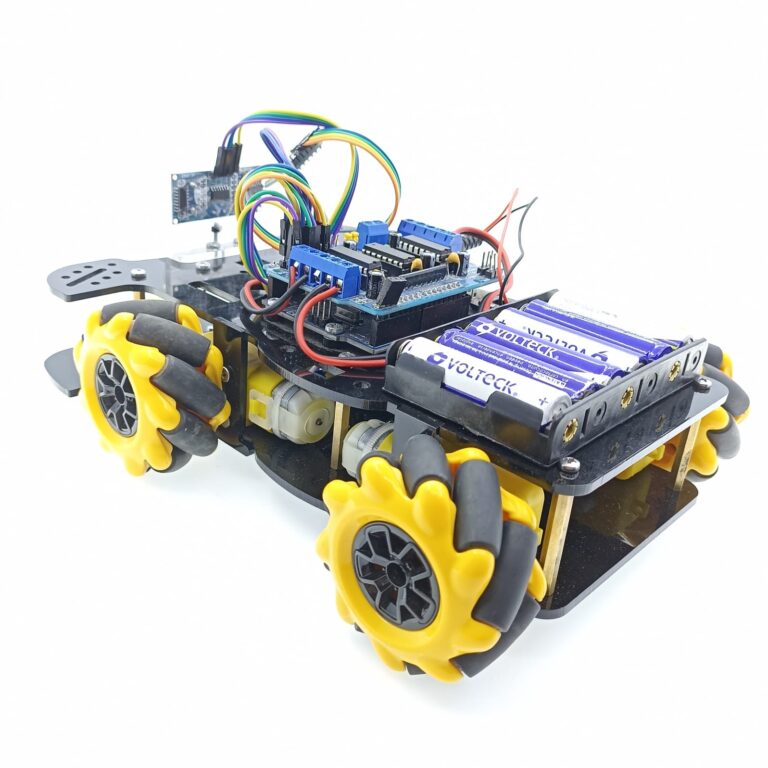
Este es el Kit visto desde la parte superior, desde esta vista podemos realizar un mayor análisis, debido a la configuración de cada una de las ruedas este es el análisis.
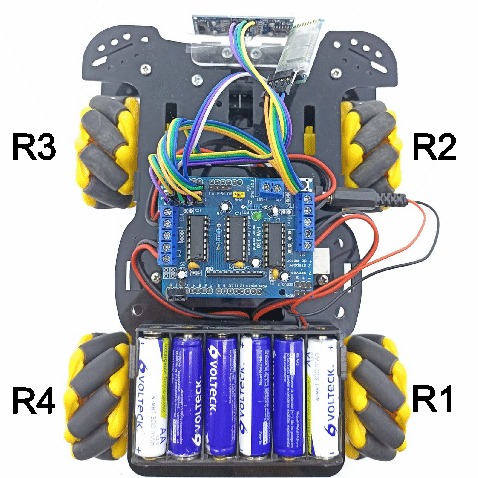
Cuando R1 y R3 rotan generado un movimiento hacia adelante, y R2 y R4 rotan realizando un movimiento hacia atras, se considera que el Robot se va a dirigir a la derecha, para entender esto hay que descomponer cada una de las fuerzas que produce cada rueda, consideremos que cada una de las ruedas produce la misma fuerza. Entonces tenemos lo siguiente:
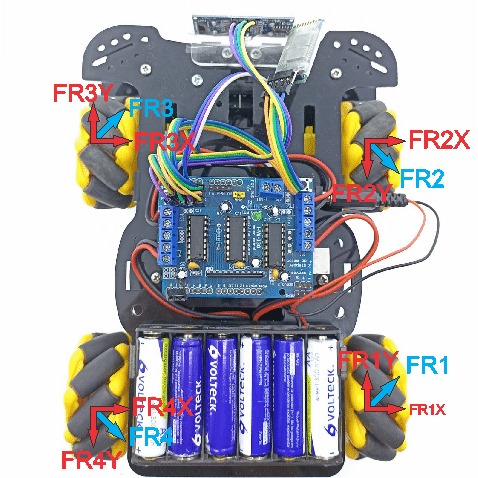
FR1x + FR2x + FR3x + FR4x = Fx
FR1y + FR2y + FR3y + FR4y = Fy
Realizando un análisis de fuerzas en el eje X, podemos darnos cuenta que cada fuerza producida en cada rueda se suma, por lo tanto tenemos que la fuerza
Ftotalx = FR1x + FR2x + FR3x + FR4x = 4Fx
Ahora analizando las fuerzas en el eje Y temenos:
Ftotaly = FR1y – FR2y + FR3y – FR4y = 0
Al terminar el análisis se observa que la única fuerza resultante es la que va en el eje X, por tanto estas 4 fuerzas se suman consiguiendo asi el desplazamiento hacia la derecha.
De esta manera es como funciona el desplazamiento Omnidireccional del Robot, solo hemos explicado uno de los movimientos. ¿Te atreves a demostrar el resto?
[pafe-template id=”2764″]
