
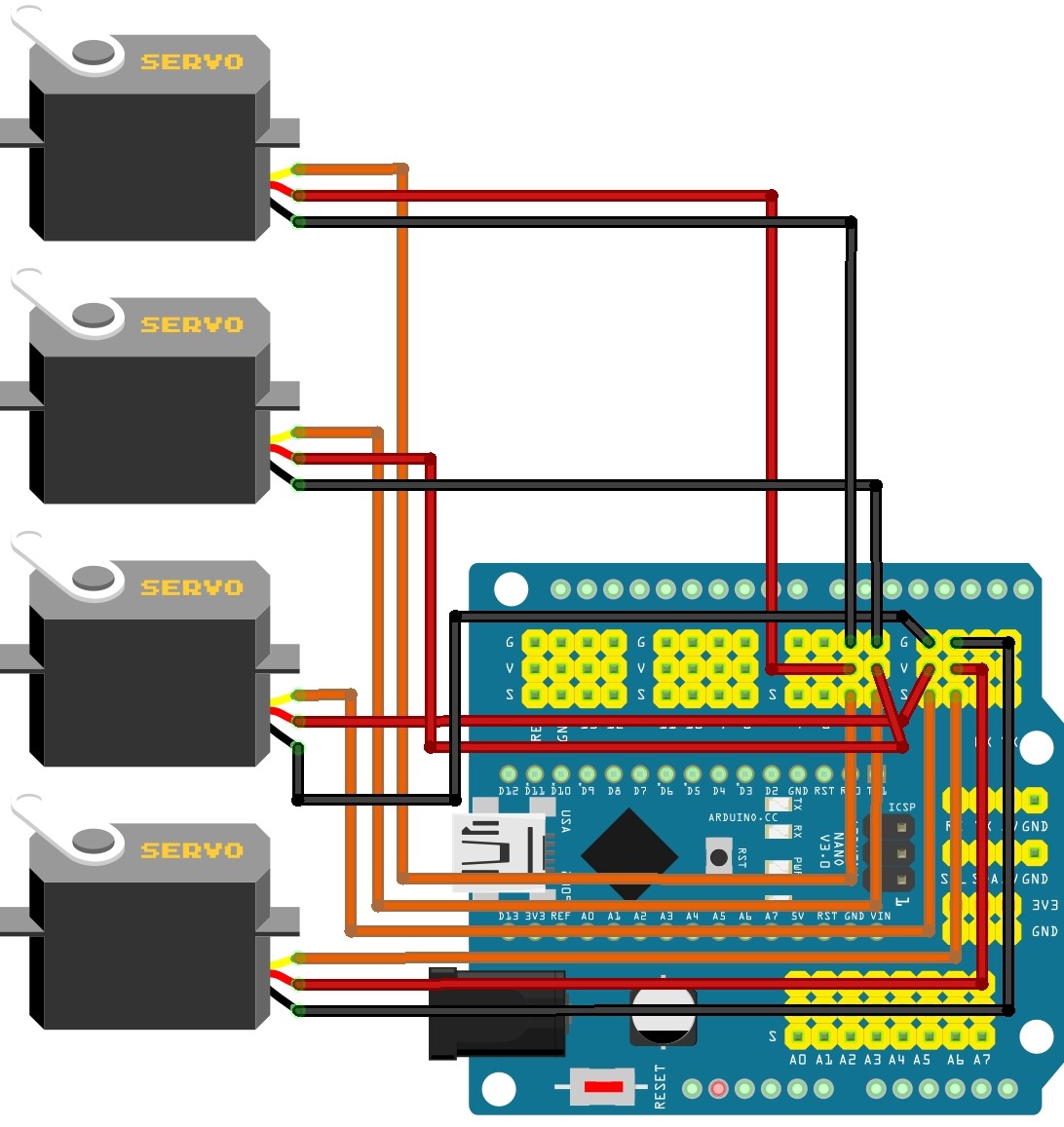
Conexión de motores
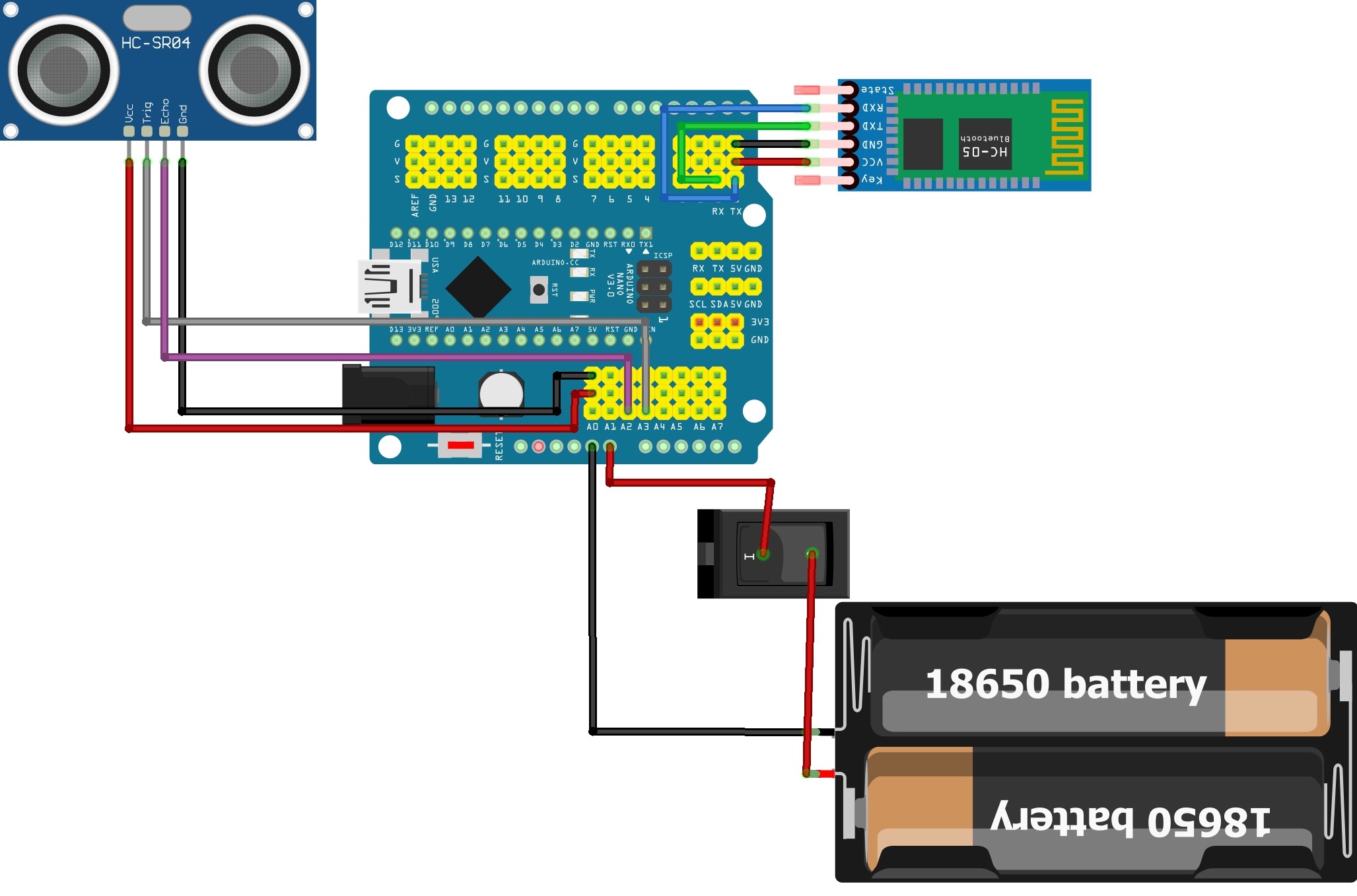
Conexiones de sensores y alimentación
Conexión de motores
Primera parte.
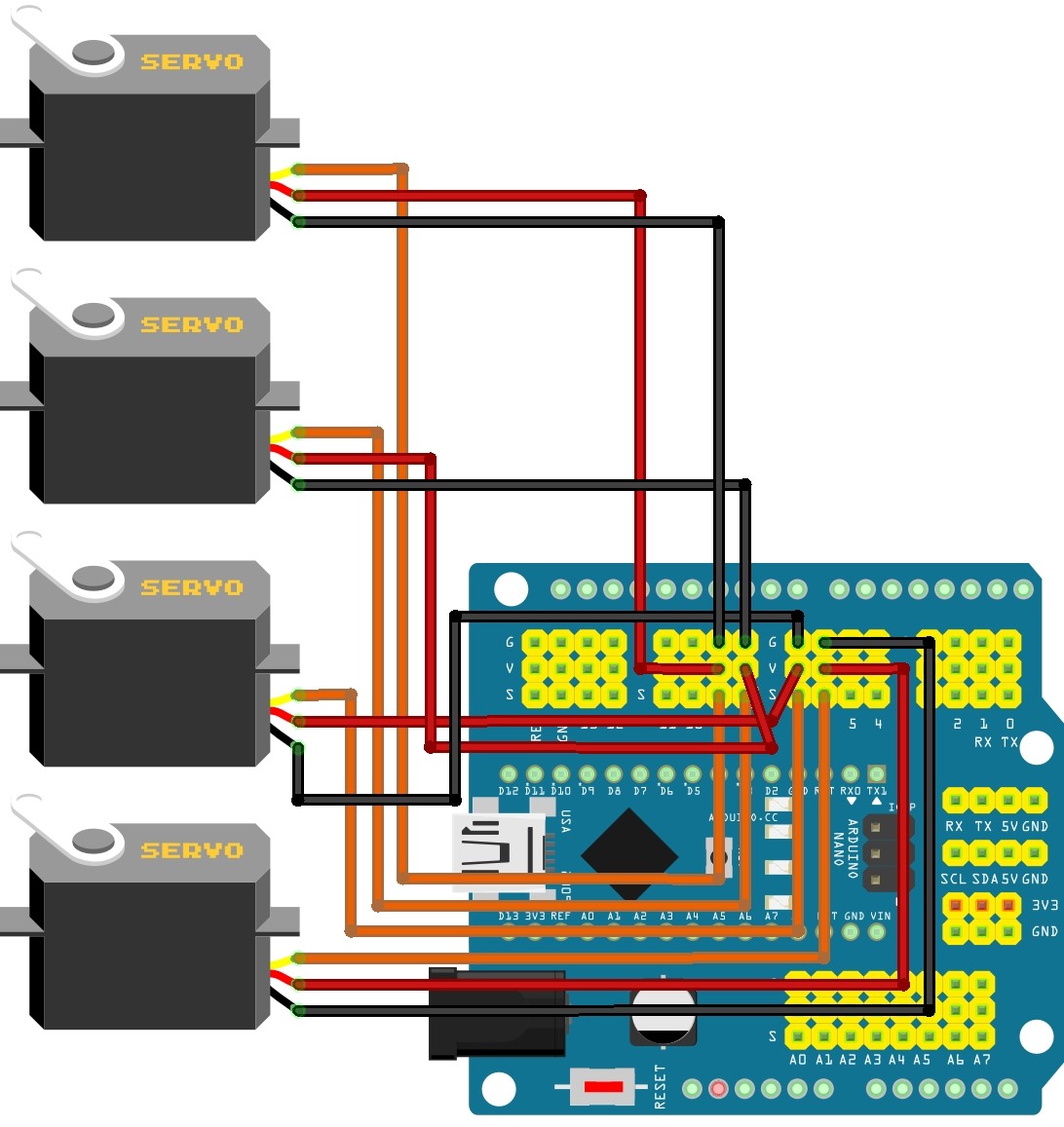
 Segunda parte
Segunda parte
Conexiones de sensores y alimentación

Plataforma de Robotica Didactica Aprendizaje Steam
Primera parte.
Segunda parte
